Timeless Tricks for Today’s Robots
While technology has improved the reliability of a push-only aluminum welding system, some proven tips still apply
BY Chris Anderson, associate chief engineer at Yaskawa America Inc. (motoman.com), Motoman Robotics Division, Miamisburg, Ohio.
Reprinted with permission: The AWS Welding Journal
If you are skeptical that an industrial robot can achieve more than 3 million aluminum arc starts per week with a push-only wire feed system, think again. While many profess that successful robotic welding of aluminum requires a two-drive, push-pull feed system, that is not necessarily the case. Add in the higher cost of operation and maintenance and push-pull is not always the way to go.
Past Push-Only Success
During the 1990s, hundreds of robots produced an aluminum radiator support for trucks. One of the largest production lines for aluminum fabrication at the time — with 90 welds per part and peaking at 35,000 parts produced each week — utilized older, traditional robots and power supplies.
These robotic arms used wire feeders mounted on the upper arm to reduce the torch length, and they did not have modern hollow wrists, which eliminate torch cable bends that impede wire feeding. Power sources with inverter rectification were also used but with slower processing and feedback loops compared to today’s power sources that can control actions in microseconds.
Timeless Welding Tips
While technology advances have improved the reliability of a push-only aluminum welding system, there are some proven “tricks” that are still applicable. The wire feed path can be separated going into and out of the wire feeder on the robot arm. From the wire feeder, the following considerations help to reliably push the aluminum electrode through the torch:
• Keep the torch length as short and direct as possible. Today’s through-arm robots mount the feeder directly in line with the arm, and the bending of the torch cable is generally spread over a radius that does not create a sharp bend.
• Use a water-cooled torch for improved feeding. A pulsed current, which is hotter and radiates more heat, is used for aluminum. The high thermal expansion of the aluminum wire and copper tip can cause them to bind and restrict the feed in high temperatures.
• Reduce the number of “breaks” in the feed system. Ideally, the composite (plastic) torch liner is continuous from the feed rolls to the back of the contact tip. Torch adaptors with intermittent liners should be avoided because breaks in the feed system create points where misalignment might rub the electrode and create shavings.
• Use a “jump liner” in the end of the torch. The plastic liner that provides a smooth surface for the aluminum wire to push through can break down from the heat of the arc. Torch manufacturers offer a short brass liner that can be threaded onto the end of the plastic liner to prevent the plastic from melting and shaving the electrode with sharp edges. The plastic liner should extend past the bend in the torch neck, and the brass section should extend the last couple of inches to end in the diffuser.
• Limit the torch barrel angle for the application. It is common now to use a 45-deg torch barrel with a through-arm robot so the work angle will be 45 deg with the wrist pointing downward. However, this much angle may cause a lot of resistance to the wire push force, and a lesser 35- or 22-deg torch barrel may work better, especially with a longer torch cable.
While these guidelines are certainly applicable to the setup of the robotic torch for an aluminum weld system, everyday practices can still impact the productivity of a robotic workcell. To maintain a torch on the shop floor, manufacturers should apply the following:
• Don’t cut your plastic liners with wire cutters or welpers. These can crush the inside diameter (ID) of the liner and create sharp surfaces that can shave the electrode as it passes. Do use a knife to cut the plastic liners to length. If a burr is formed on the ID of the liner, carefully use the end of the knife to remove it and leave a chamfer.
• Don’t reuse a liner after a “bird’s nest” in the feeder. A blockage in the torch can result in the feeder continuing to push wire into the torch and packing the liner until an arc fault is generated. It is necessary to pull the wire out of the back of the torch to clear the jam, but reusing the same liner will leave an enlarged feed path that makes it easier for the wire to repeat the jam.
• Don’t mix consumables for aluminum and steel. Running a steel electrode through your plastic consumables can result in ferrous shaving contamination. It will also cause them to wear out quicker. Many job shops reading this will confess to mixing setups between materials, but trying to run aluminum wire through steel liners is more likely to cause trouble.
• Do check your feed path resistance. Do this by releasing tension on the drive rolls and pulling wire out through the contact tip. A few pounds of force should pull the wire through and 10 lb would be excessive.
• Do check your feed roll tension. Do this by increasing it to the point where you cannot stop wire inching through your thumb and forefinger lightly pinched together. Wire straighteners should be avoided because they interrupt the feed path. Also, the feed rollers will take out any recast added by a straightener, and feed roll tension that is too tight will cause the aluminum electrode to curl past the tip.
• Do change your torch liners on a more frequent basis than with steel wire. Blow compressed air in the back of the liner and note what comes out the other end. A large puff of soot is drawing compound from the wire and may mean liners need to be changed more frequently. If metal shavings are present, then the feed path needs to be checked for a wear point. Wire can be fed out at various points in the feed path and twisted by a cranking motion between your hands. This causes small grooves in the wire to open up, and they are easier to visually detect if the wire is being scraped.
Also critical is the delivery of the electrode from the package to the robot. Most bulk packaging of aluminum electrode comes in drums. It is reverse wound when spooled into the drum so that it does not flip when pulled out of the package. Using a dispensing package with a rotating arm lets the electrode enter the feed path through ceramic inlets and avoids tangling or dragging on cardboard edges.
Depending on the feed distance, it might be advantageous to add an assist feeder to pull the wire out of the package and lightly push it toward the robot. The automotive application referenced used motors to turn large wooden spools wound with 500 lb of electrode so the wire feeder on the robot did not have to pull a high force. Today, there are aftermarket assist feeders that operate by pneumatic or electronic control. They are independent of the power source feed system and basically feed on-demand when they sense the wire being pulled.
Just like the torch liner, the rear conduit should be made of plastic polymer to reduce friction and not abrade the wire. There are a variety of commercial products available that will provide smooth surfaces for the wire to transition from the wire package into the conduit. Angled transitions with rollers can allow the wire direction to bend into the workcell without adding significant drag or wear on the wire.
A more flexible section of conduit is needed to lead into the feeder on the rear of the robot. Conduit with roller segments is available to allow the electrode to travel around bends with less resistance, but these are at a higher cost. Wire conduit is a consumable and should be changed before it breaks down and might cause wear points on the wire. While plastic polymer reduces friction, it can also get nicks or sharp edges that scrape the soft aluminum electrode.
Welding Equipment Considerations
The power source is a key element in the aluminum welding system. Manufacturers should have process schedules for the aluminum alloy and wire diameter desired. These schedules should have arc starting parameters designed for positive arc starting on a reliable basis. For the automotive radiator support project, the goal was making 2000 arc starts with the same contact tip. A good aluminum arc start has a crisp sound and does not pop or extinguish.
Arc ends are more critical than starts, and the wire should terminate with a sharp point or small radius on the end. A ball on the end of the wire will make it more difficult to start the next time due to its larger oxidized surface area.
A power source manufacturer that promotes its power source for aluminum push applications will have plastic wire guides for its feeder, along with drive rolls that have U-shaped grooves for the 3⁄64- or 1⁄16-in.-diameter electrodes. Electrodes smaller than 3⁄64 in. should be avoided with push-only systems.
Collaborative Push-Only Perspective
The popularity of collaborative robots (cobots) for welding is bringing back traditional torch mounting with an external torch cable. While not always ideal, using this setup on cobots for aluminum welding can be successful. The torch length should still be kept as short as possible with the feeder mounted above or behind the robot. The torch cable should be supported in an arch over the robot and not allowed to make sharp bends or wrap around the arm or wrist.
Present Push-Only Success
Welding more than 35,000 high-quality aluminum parts (68 in. long, with 60 welds per part) with great success, TnL Welding, a fabricating operation in Sidney, Ohio, is no stranger to the robotic welding of aluminum via a push-only wire feed system. Robust tools, including several Yaskawa ArcWorld® welding workcells of different generations, help facilitate this production. Capable of welding various metals, each ArcWorld is equipped with one to two high-performance arc welding robots that expertly accommodate push-only wire feed systems. TnL has found that the newer welding technology provides improved results with welding aluminum. Like TnL, other companies can achieve high-quality aluminum welds via traditional push-only feeders when certain criteria are followed.
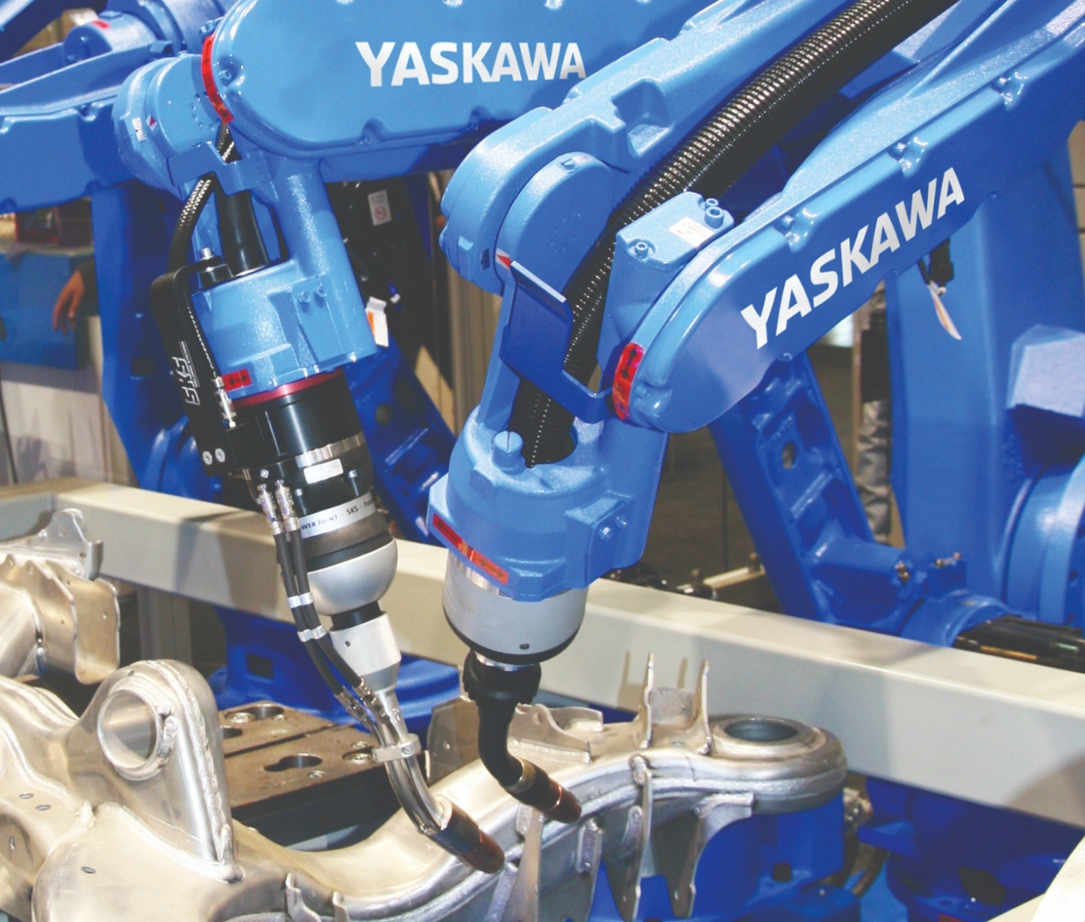
Lead photo: Robotic workcells with high-performance robots equipped with push-only wire feed systems are being used today for high-volume aluminum-part welding.